Autonomous Race Car
using python OpenCV to drive a race car autonomously
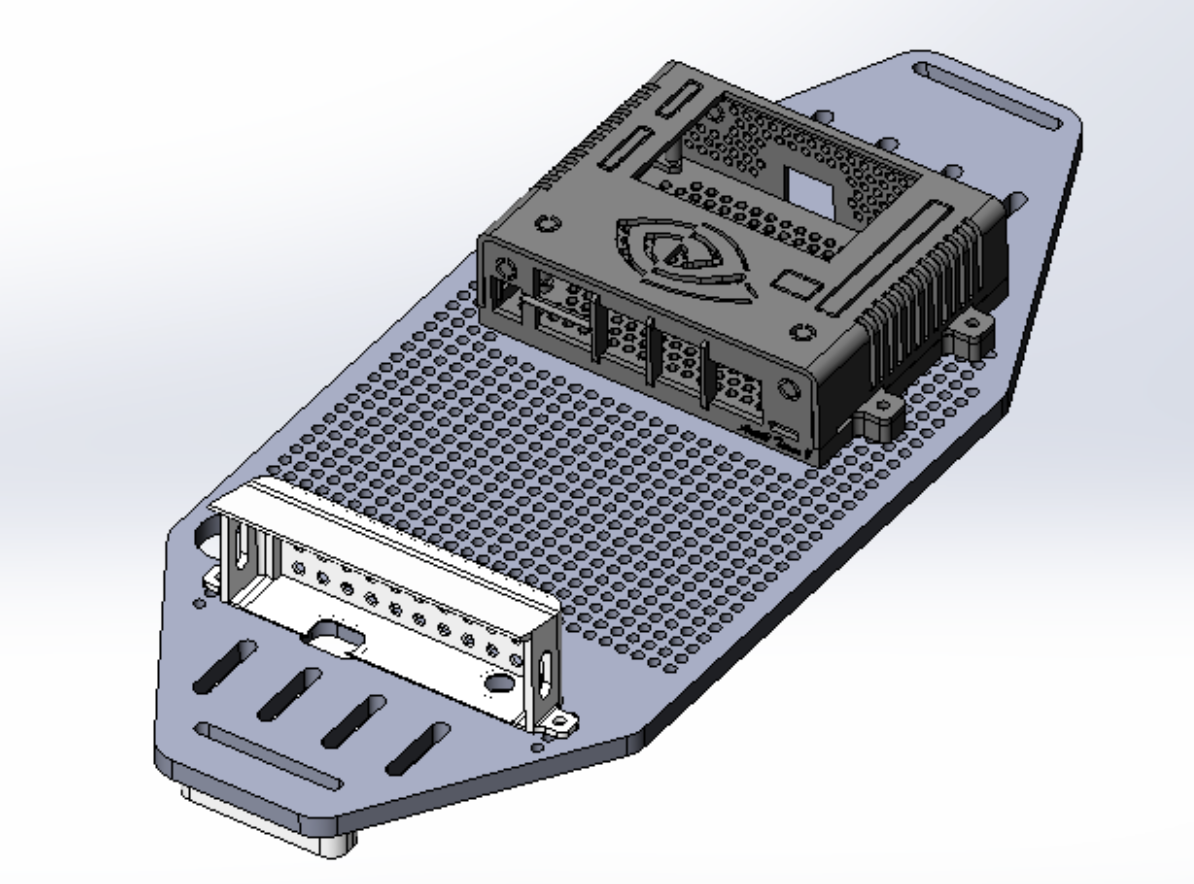
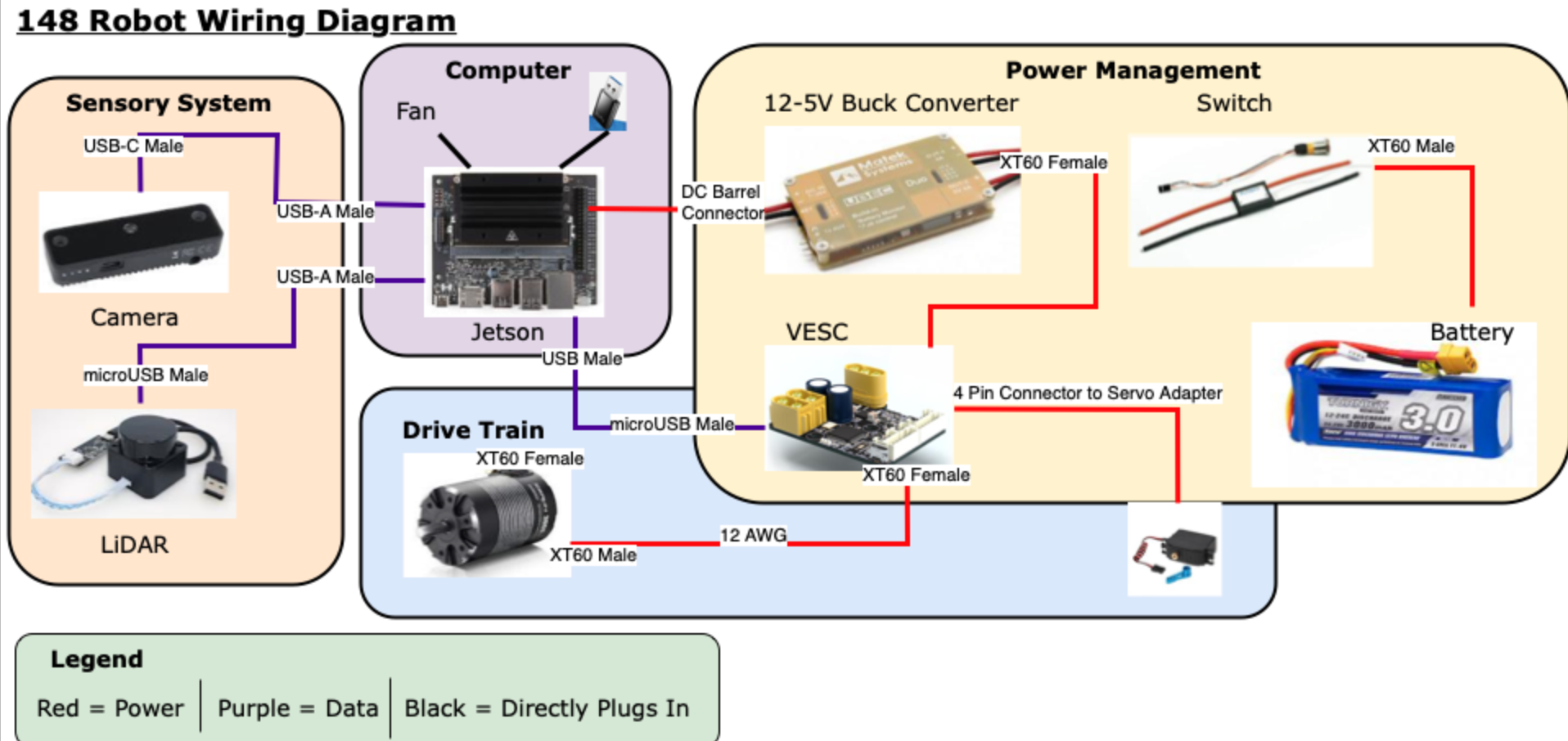
3D Model of Electronics Mounts and Wiring Diagram
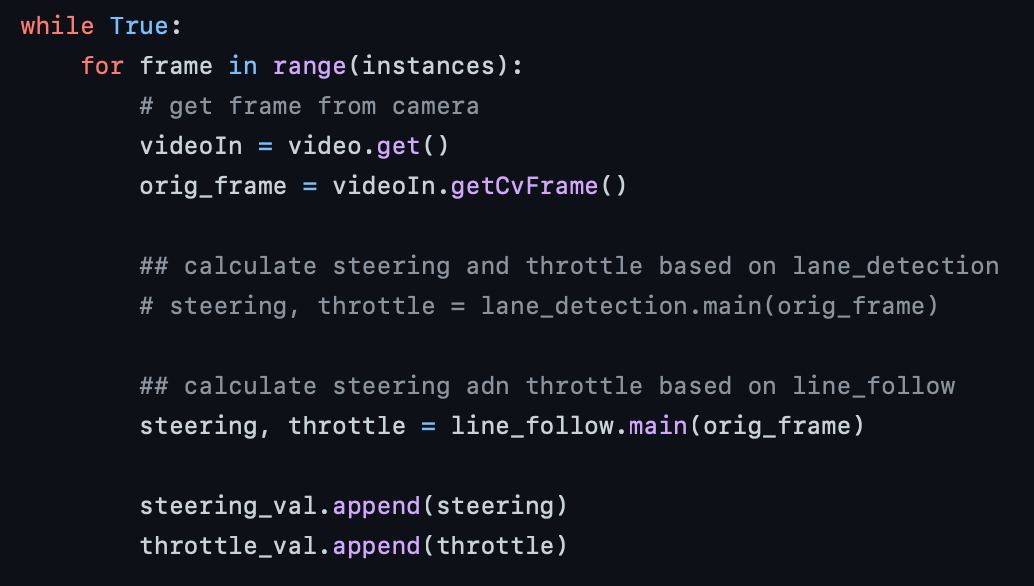
Example Code in Main
I worked on developing the code for the race car to drive autonomously. I experimented with two different methods: lane detection and line following.
lane detection method: the camera would detect the left and right lanes and drive in the direction of the average
line following method: the camera would detect the yellow centerline and follow that line.

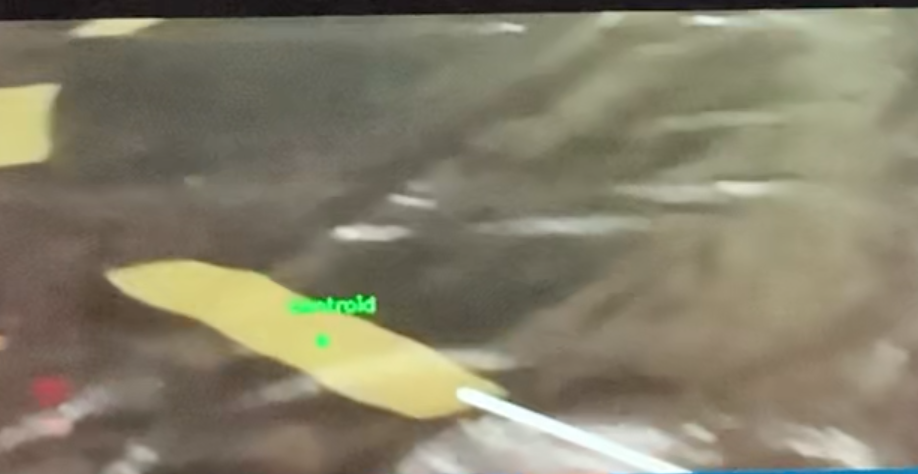
Lane detection (left) and centerline following (right)
The repository can be found here at https://github.com/rqnguyen100/MAE_148_Team8_OpenCV and the video can be found here: youtube link