Balancing Robot
an R&D project about a two wheeled robot capable of vertical expansion
December 7: Due to lack of personnel and funding, the project has been cancelled.
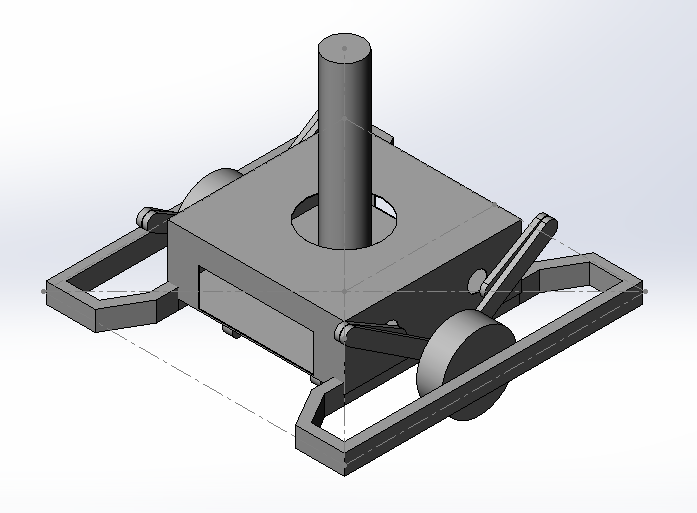
This is an ongoing R&D project for Triton Robotics. The goal of this project is to create a two wheel balancing robot capable of vertical expansion through the use of linkages. A concept report was created and can be viewed here.
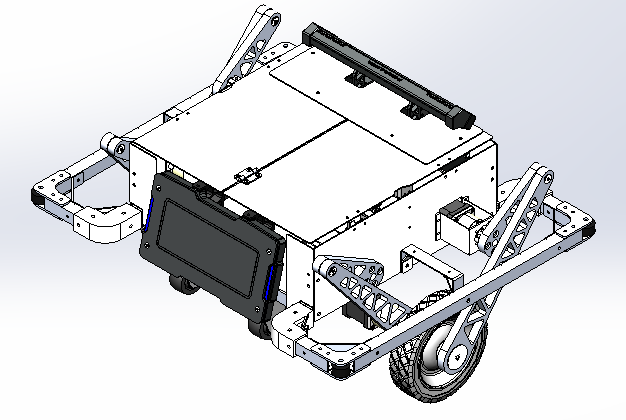
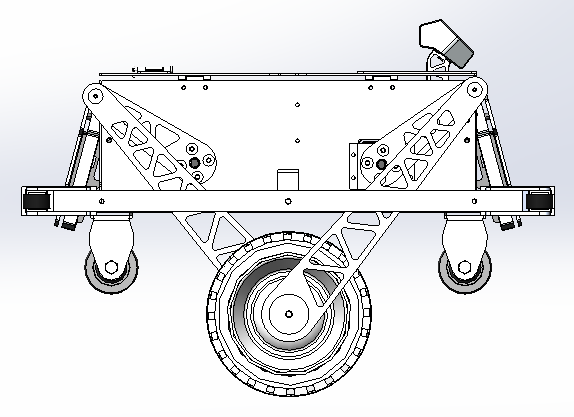
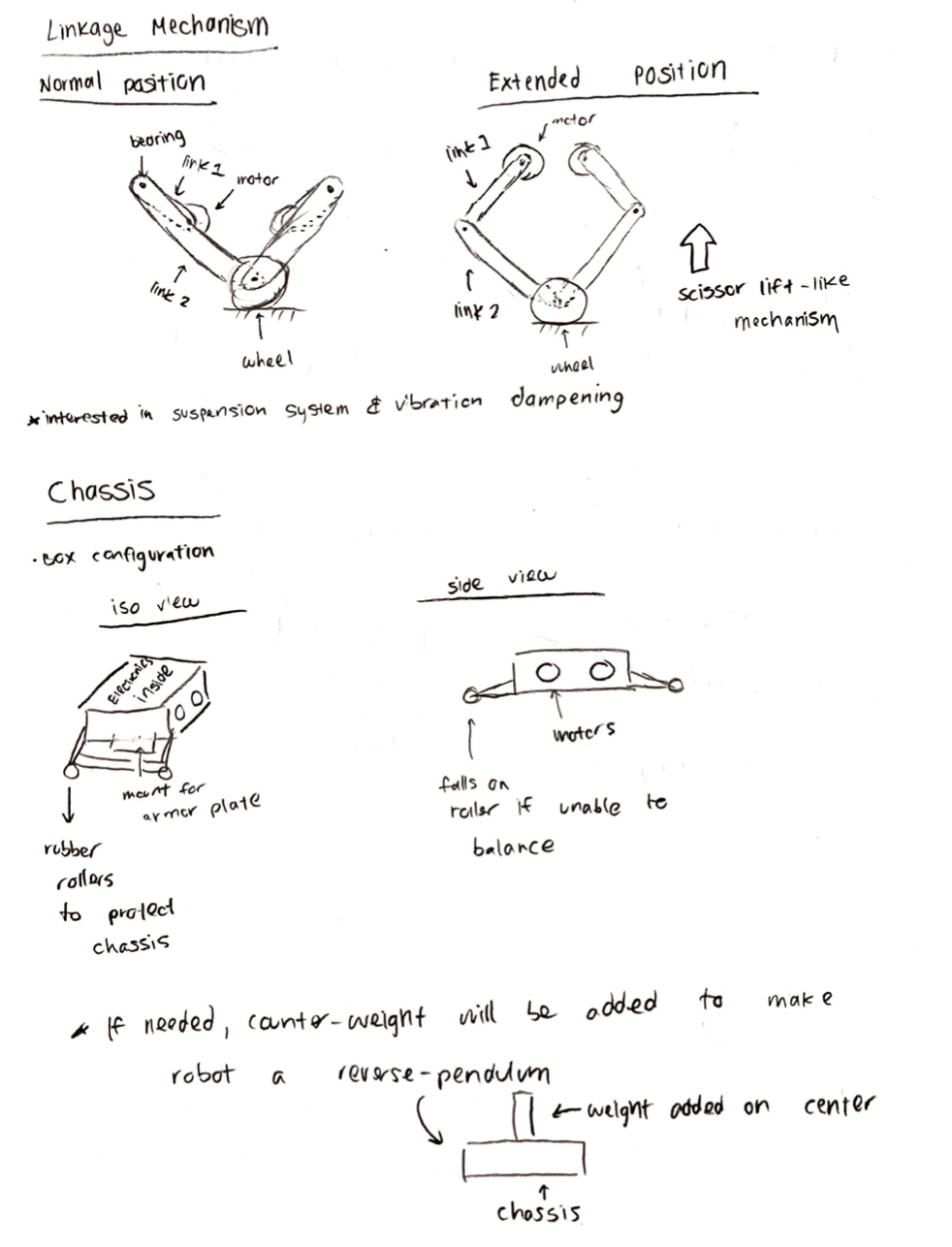
Some sketches were drawn before proceeding to the 3d-modeling phase and a draft model was created
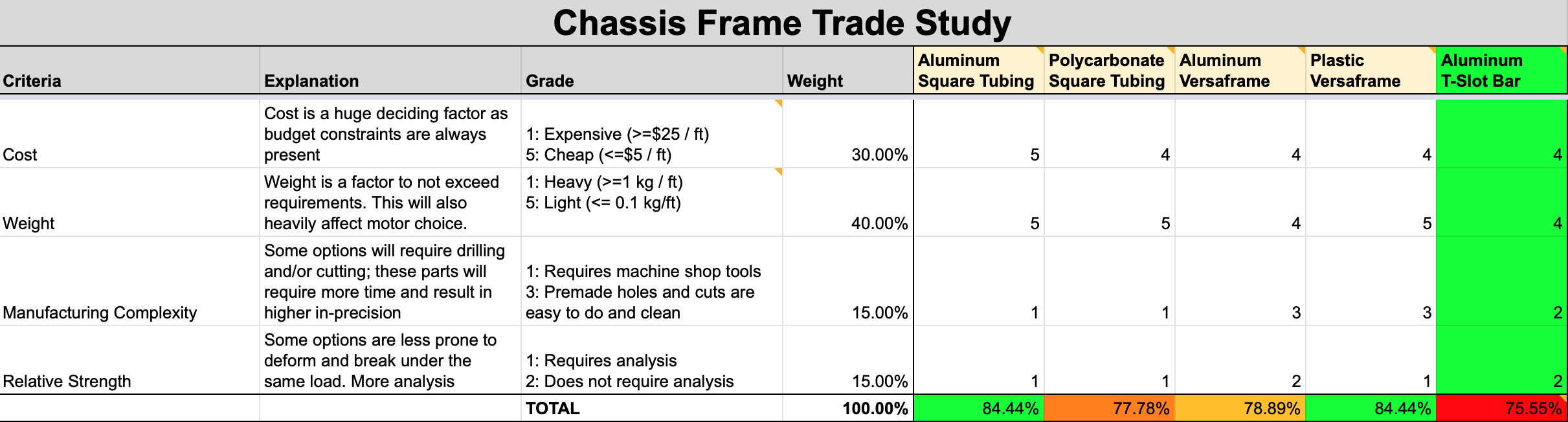
A trade study was used to determine the material for the chassis, protective frame, and chassis plating. Due to the research part of this project, extruded aluminum will be used for the chassis to determine the viability on future robots.

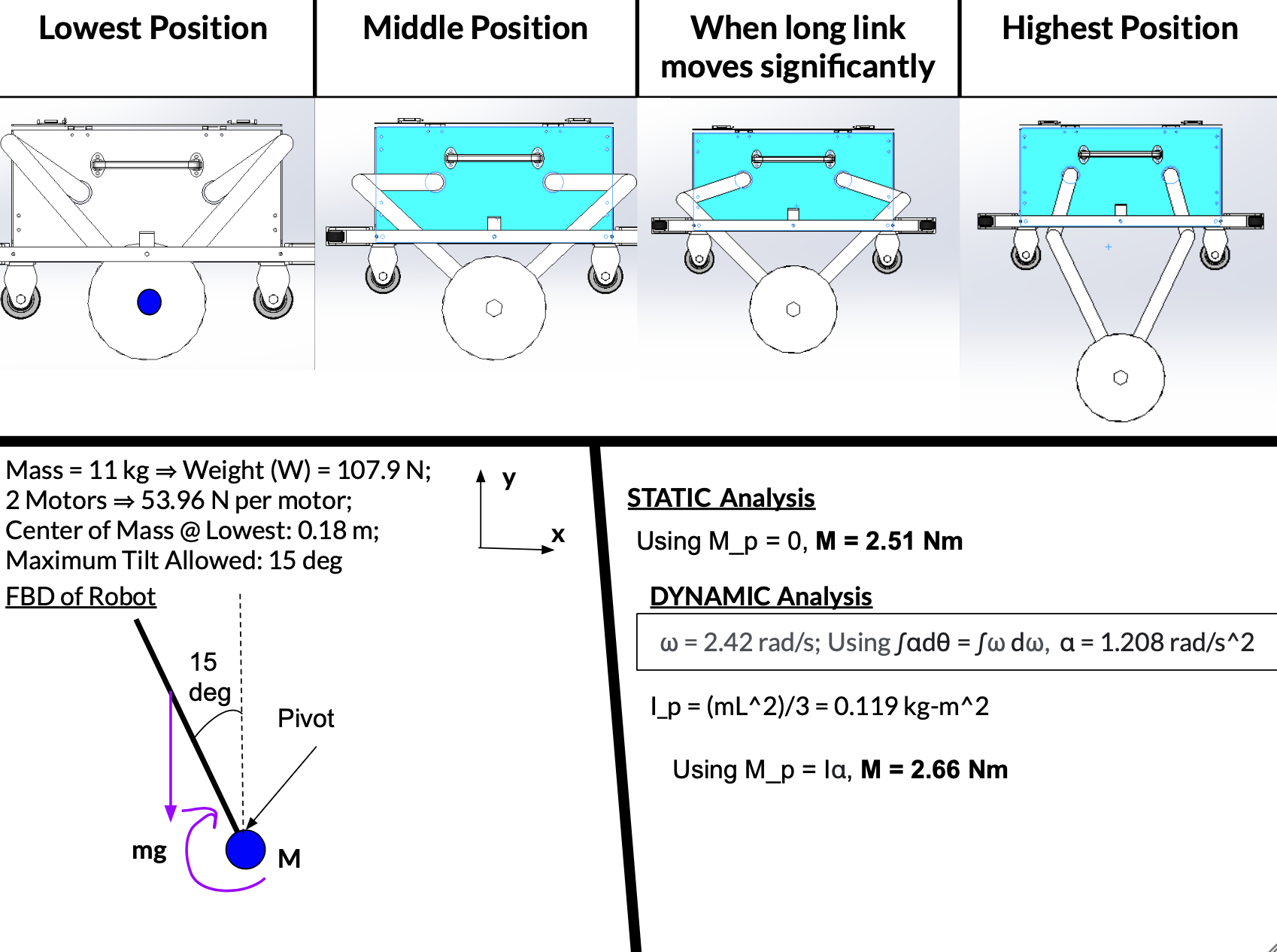
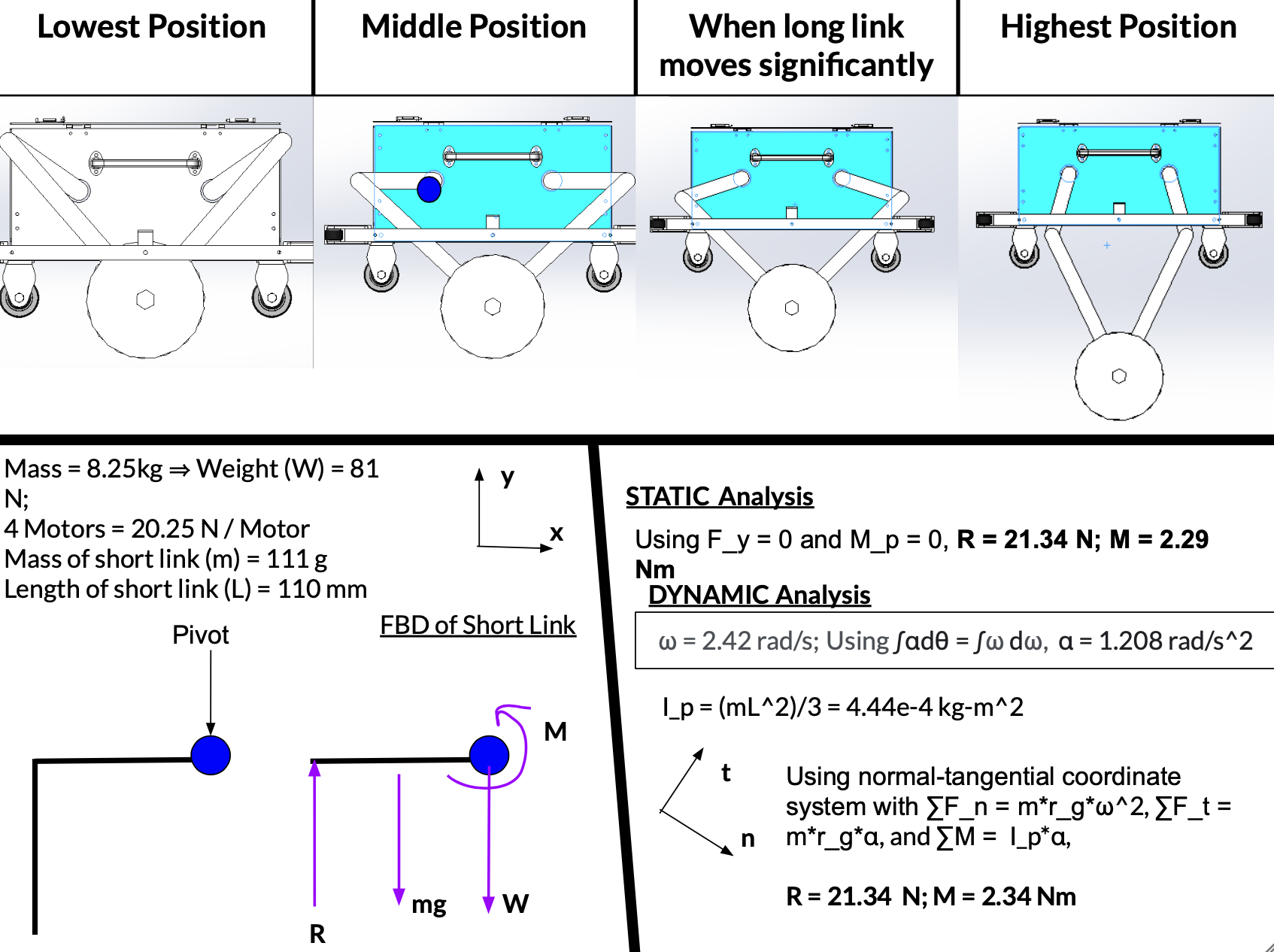
Calculations were done to determine the amount of torque required for the stepper motor.
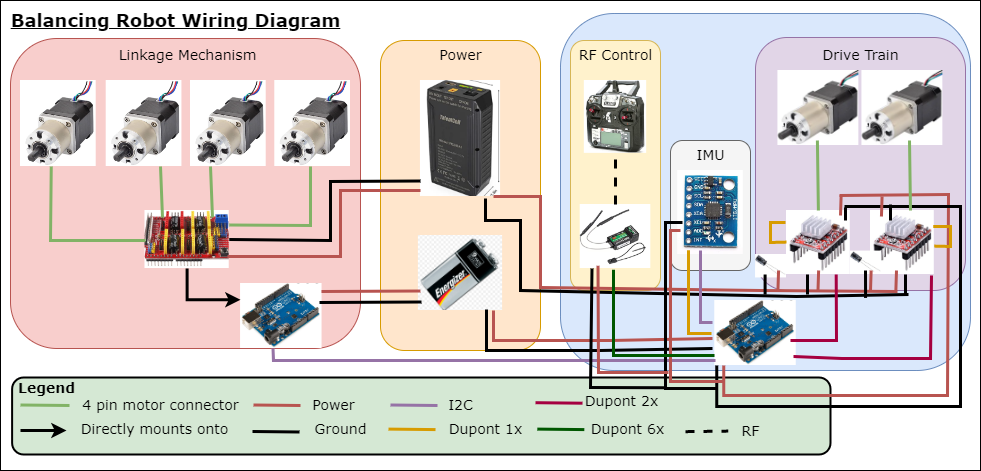
A draft wiring diagram was made based on the preliminary electronics.
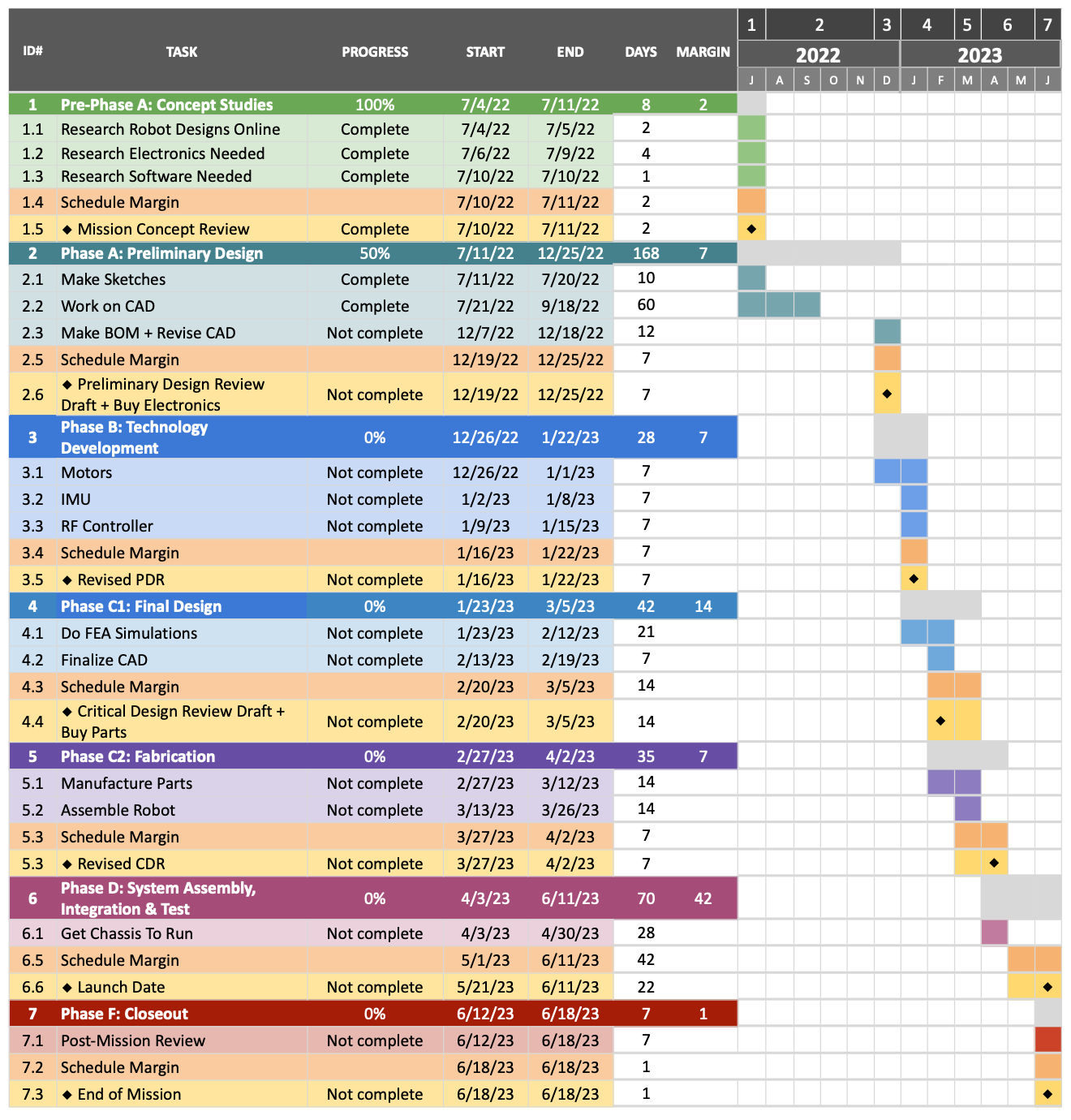
Below is the proposed schedule for this project. A hiatus will be done for the fall academic quarter to focus on other projects and executive tasks.