Capstone Project
using a chain-link mechanism to reduce with and maintain torque and power efficiency
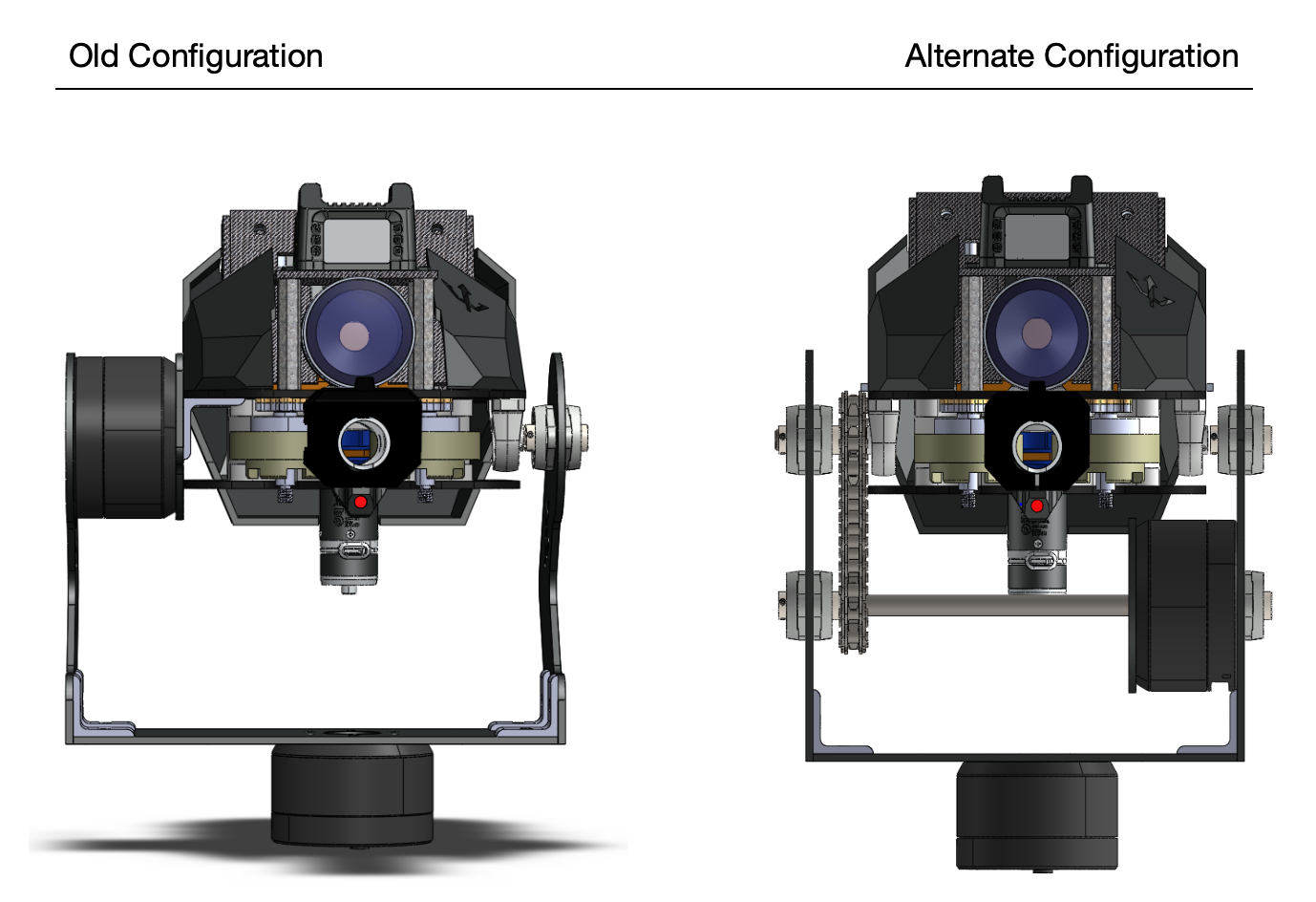
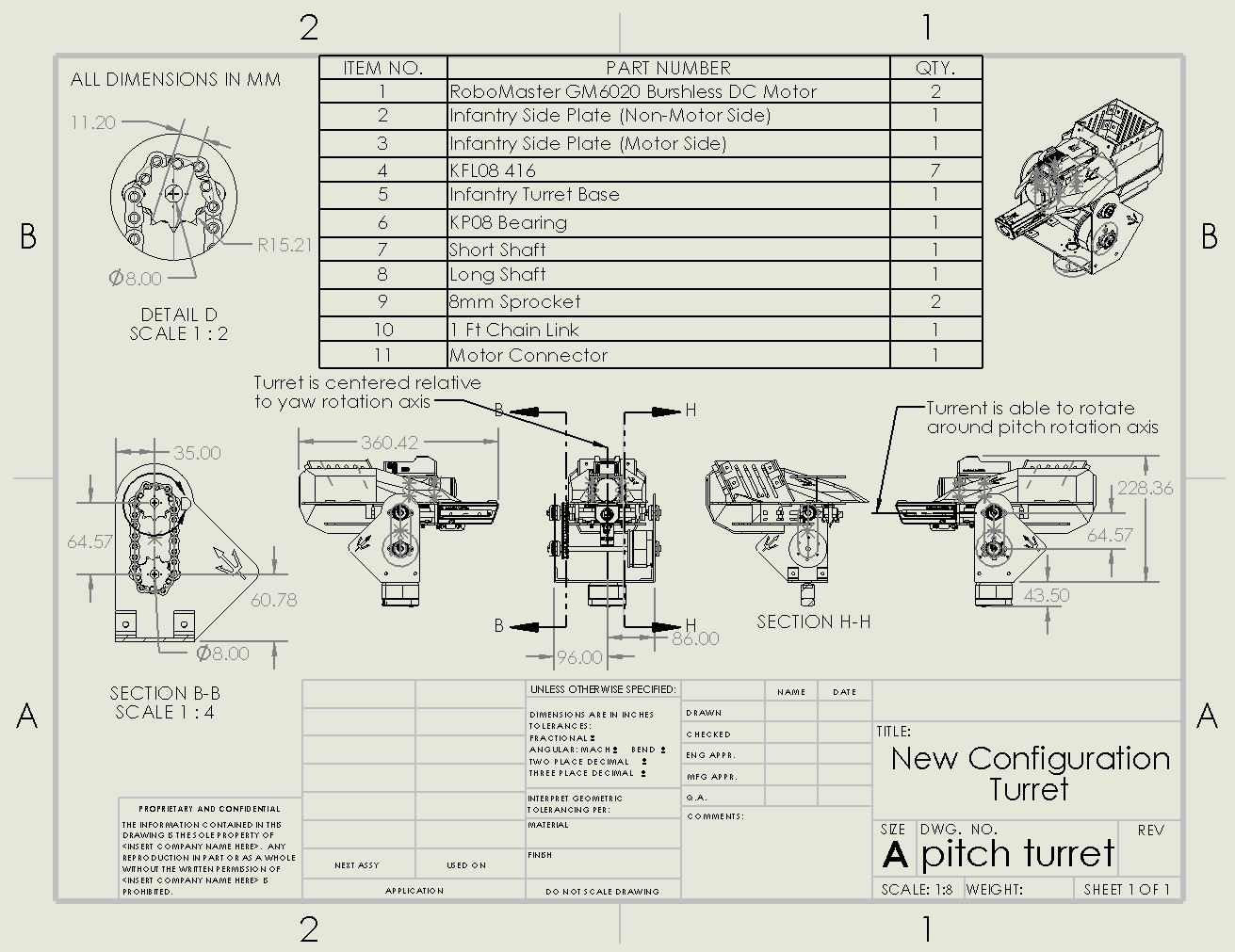
My task was to reconfigure the turret pitch mechanism. Based on the initial design, the current turret had a pitch mechanism that was direct-drive (the motor is on the left), but it wasn’t very space efficient since the motor was just sticking out on the side. The goal was to move the motor down and drive the pitch motion with a different mechanism.
I started looking at the competition rules to find what constraints I had when designing the new mechanism and also any important information like the current weight of the turret and the motor information (rated torque, speed range, etc). Those can be viewed here.
Next, I started doing calculations to understand what was the current torque and power needed to pitch the turret, so I could get a sense of how much torque and power efficiency I needed to stay within competition rules. I documented them here.
I started brainstorming rotary to rotary motion mechanisms. I first looked into 4-bar parallelogram linkages since it was a simple mechanism, but I was worried about how structurally stable it would be and the possibility of the deadlocking when the linkages were parallel. I then looked into belt drives, chain drives, and gear drives. I made a pros and cons list and ultimately, I ended up deciding to use a chain drive because of cost and that it would save the most space. The distance between the driving and driven shaft was too far apart and would result in using many gears. The mechanism would have to be bidirectional so the turret could pitch forward and backward. I didn’t have any experience with belt drives and was worried that there would be too much slack and it could only rotate in one direction. Throughout the process, I also checked relative drive prices on MISUMI USA, McMaster-Carr, and Amazon since price was a huge factor in determining what mechanism to use. My list of pros and cons can be viewed here.
Result
The animation can be viewed here and the project was documented here.