Robotic Arm
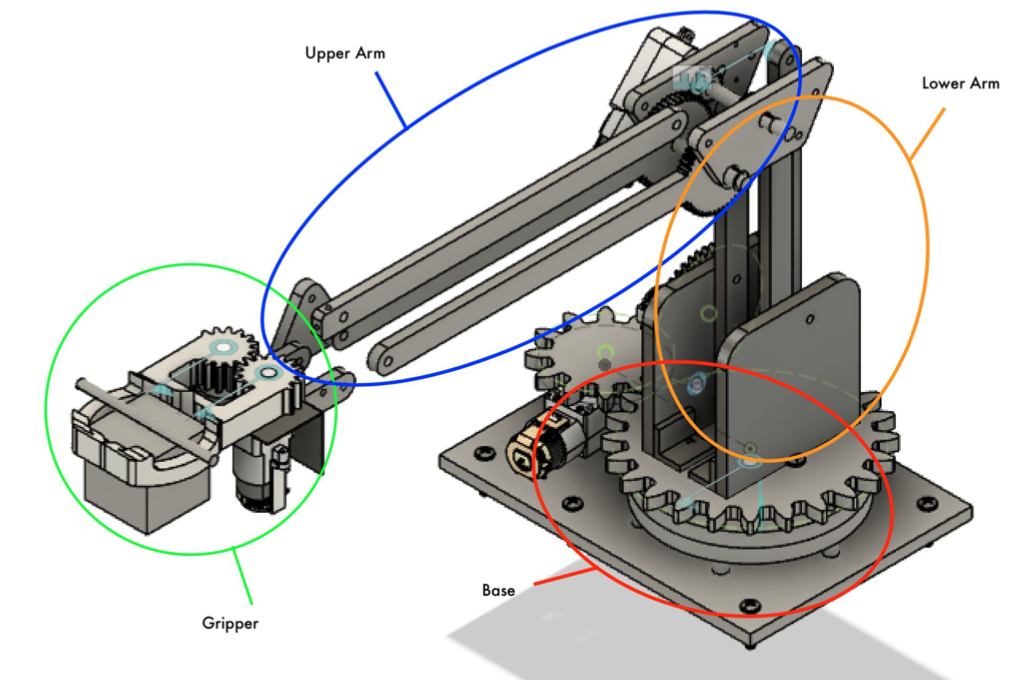
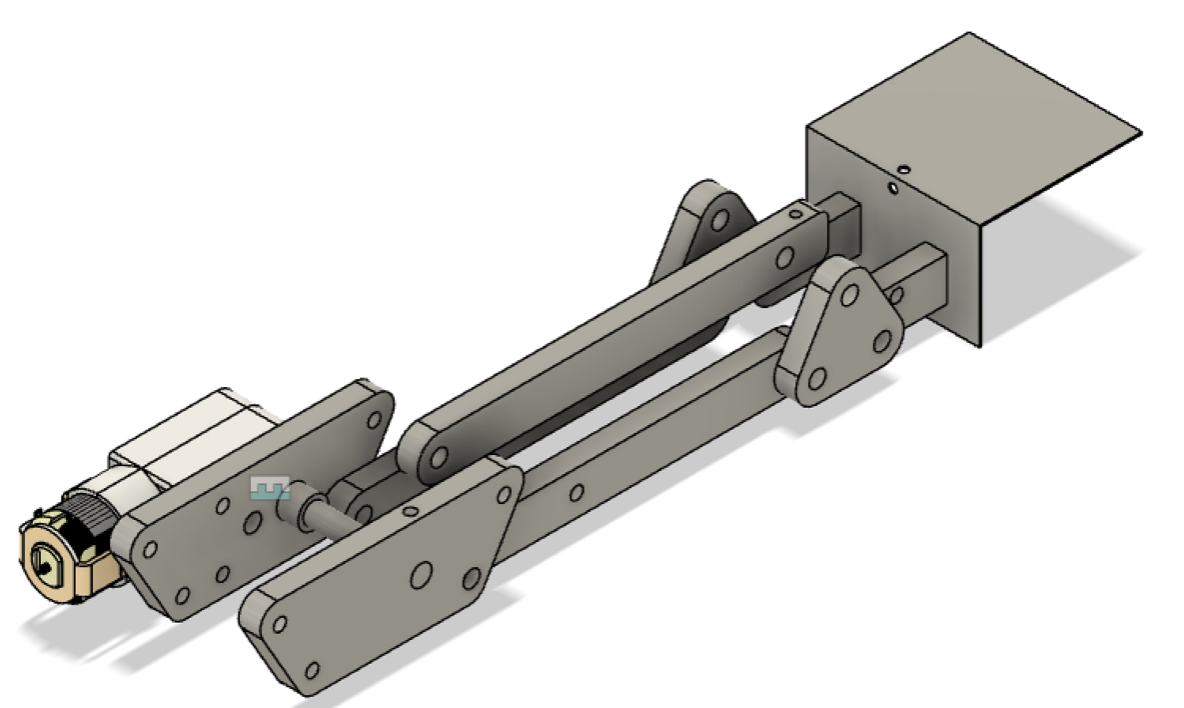
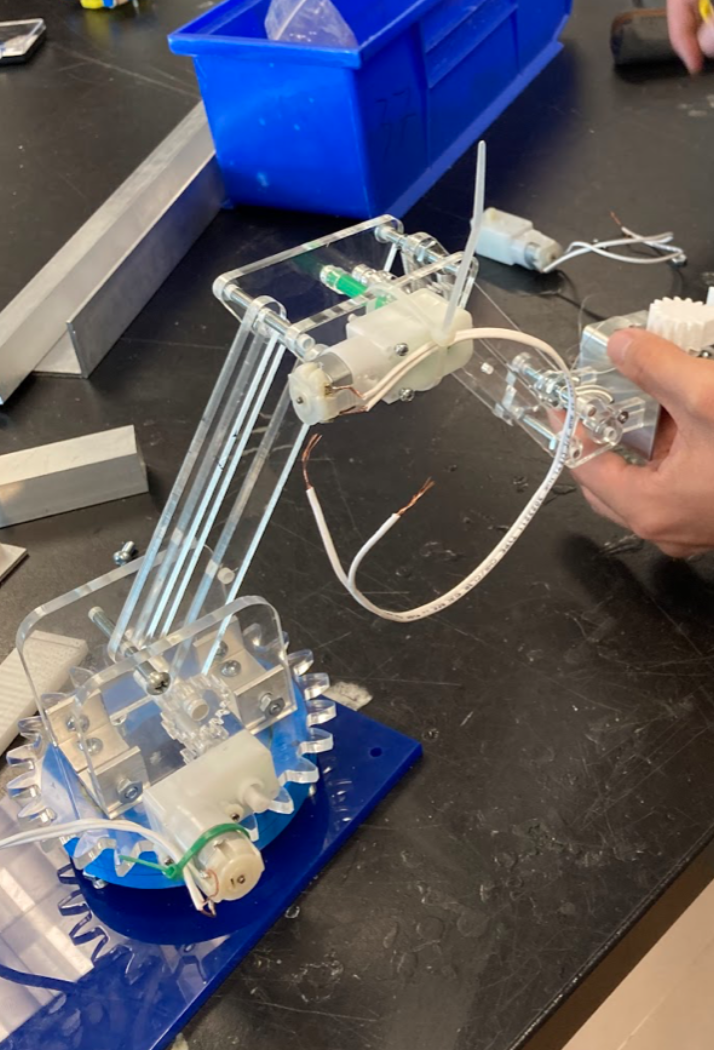
the forearm of a 2 joint robotic arm
My group and I was tasked with creating a robot that was capable of picking up a 3 inch cube from various heights around the playing field and tranferring it to a central location. The rules can be viewed here.
I brainstormed some ideas for the robot. Due to the lack of controls, I leaned heavily towards a robotic arm.
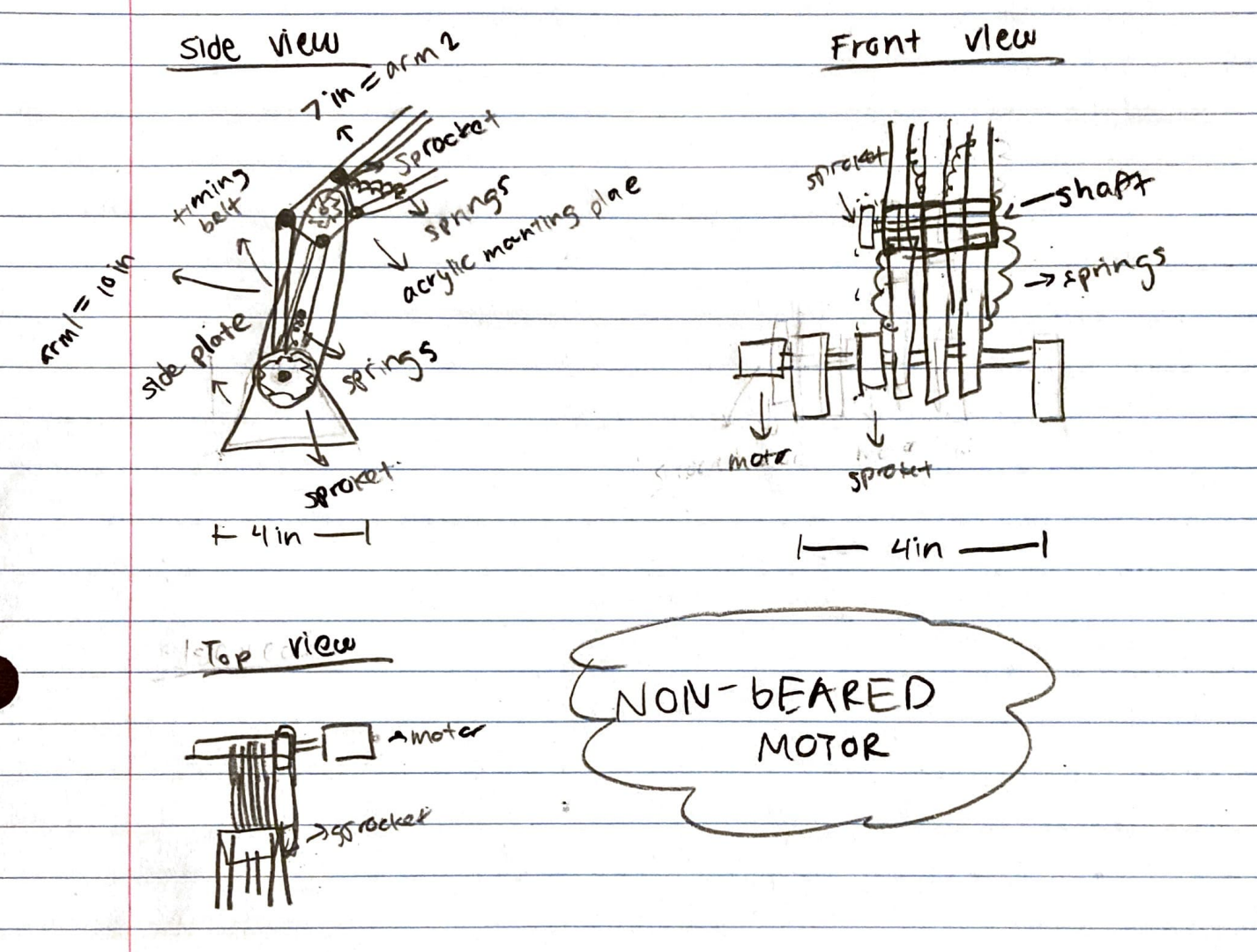
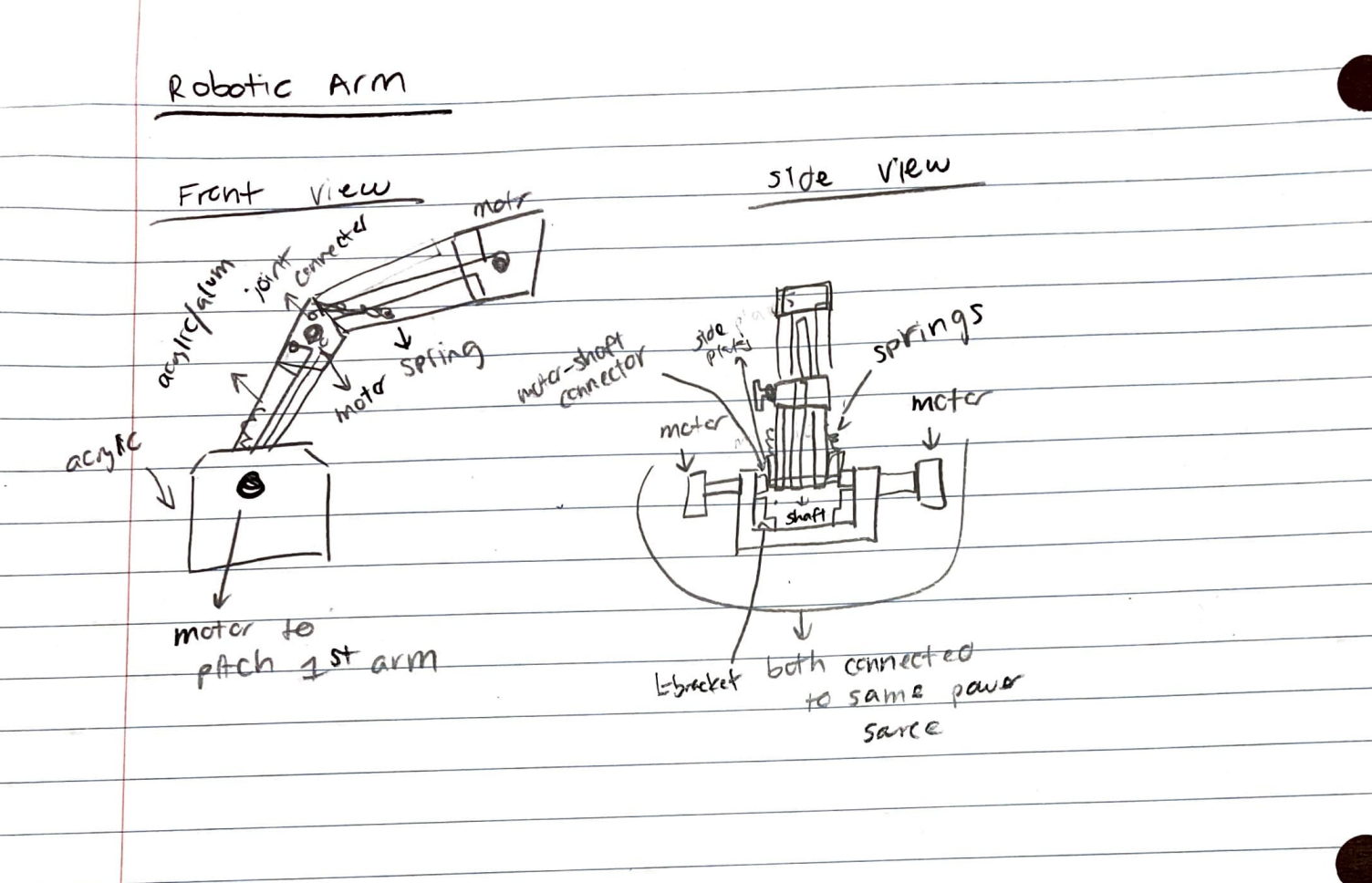
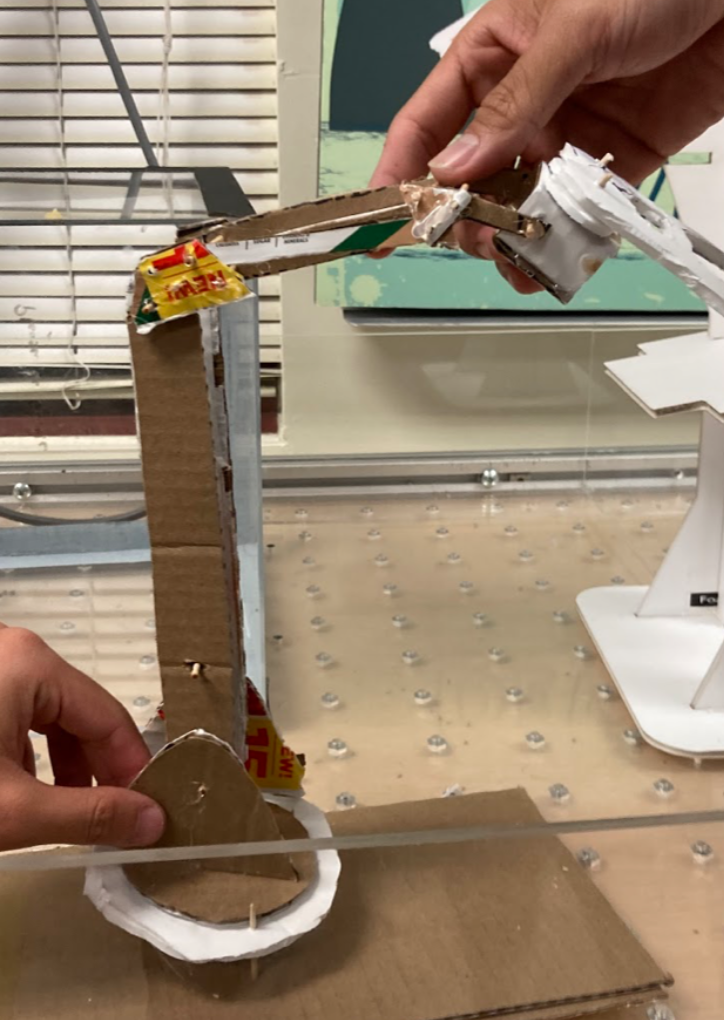
My role was to create the upper joint of a 2 joint robotic arm. I utilized a four-bar linkage mechanism to ensure the gripper was always parallel with the floor. A proof of concept was made to justify the design with cardboard.
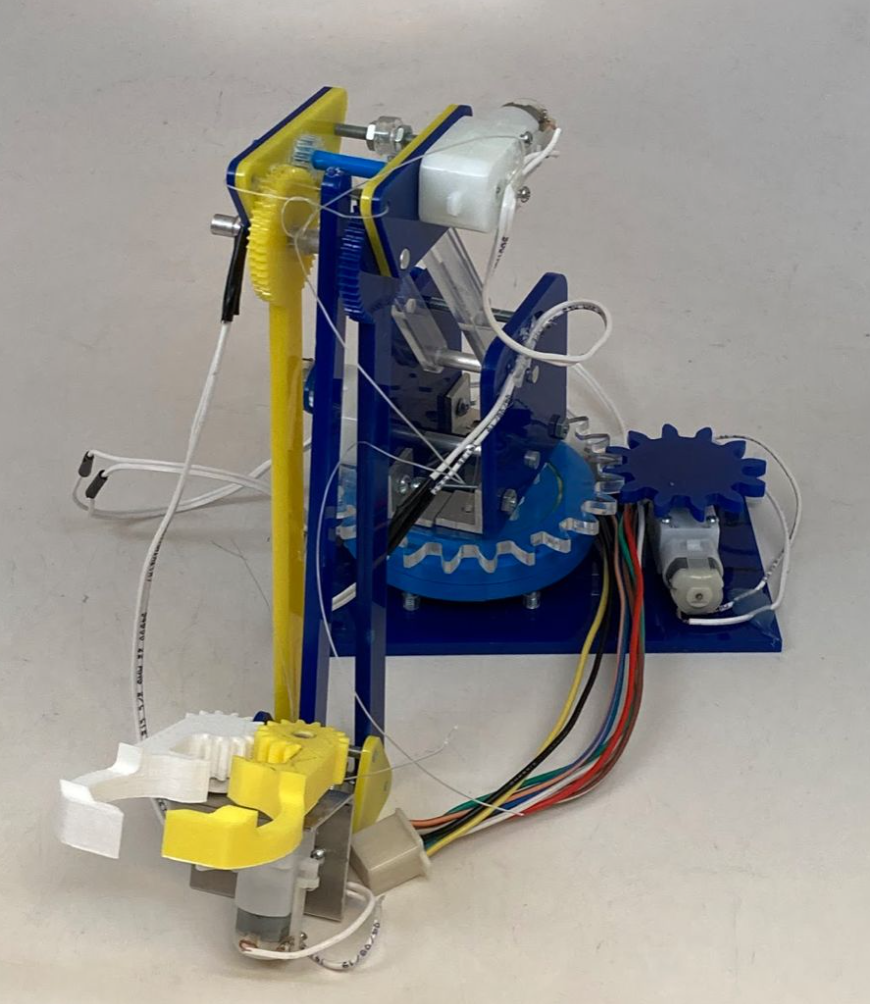
The problem with this design was that I chose the wrong axis of rotation. I changed the axis of rotation and did calculations to determine the amount of torque needed that can be viewed here. Our first prototype was built.
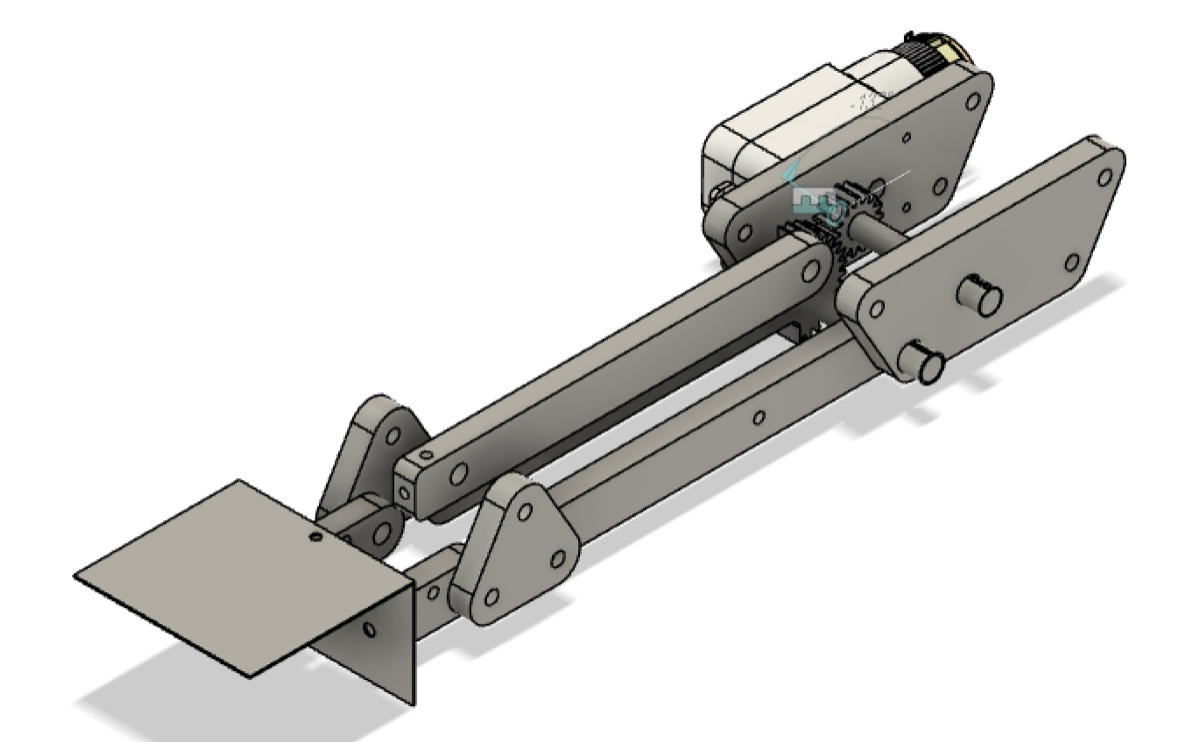
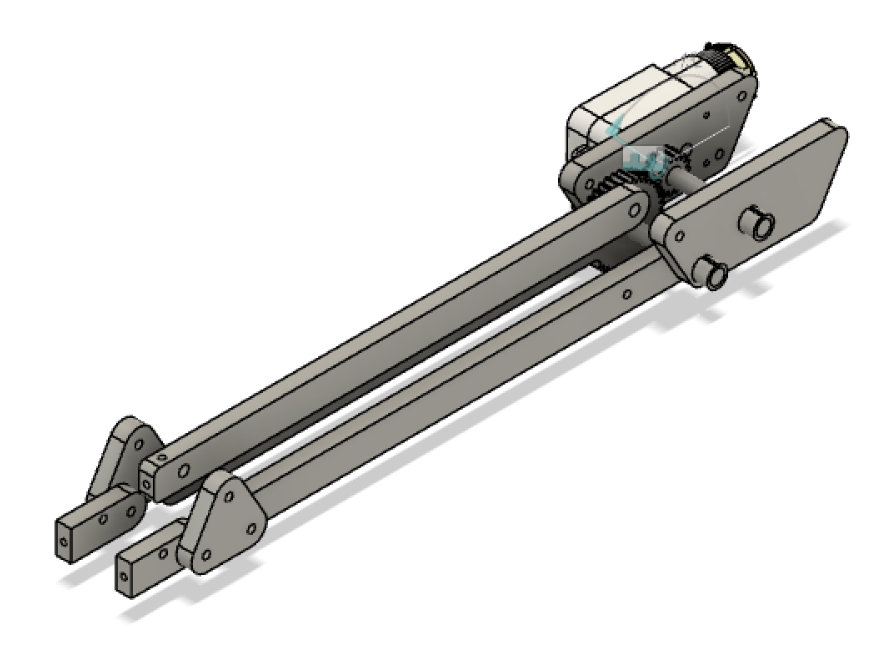
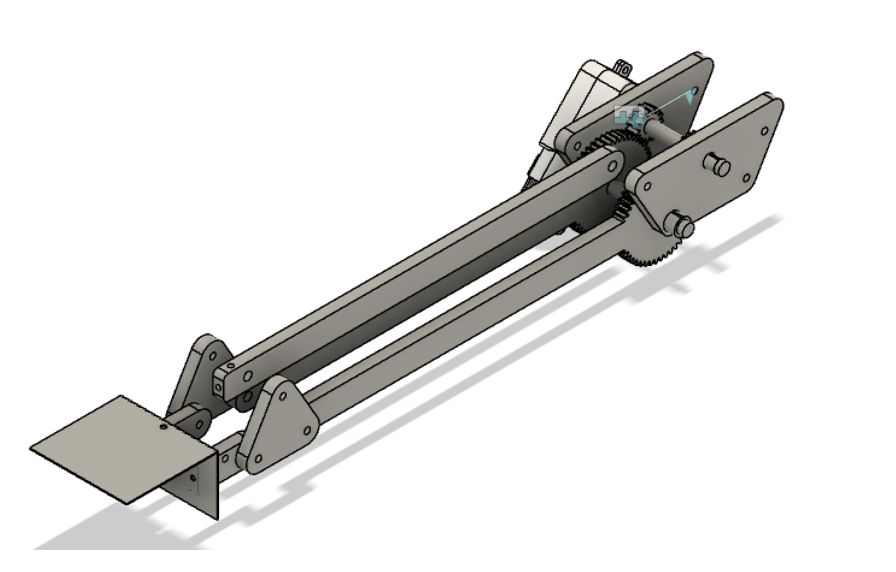
I maximized the linkage lengths and did more hand calculations here to determine the amount of torque needed. Due to the sector gear, it could not rotate 180 degrees. I also made both the linkages have gears to distribute the load more evenly and added more teeth for a larger range of motion.
The final report, presentation, and animation are embedded here.